Итак блочный
привод клевант предоставляет очень много выгод для любой телеги
или свободной модели с пилотиком, которая должна выполнять
элементы акро или же для получения хорошей маневренности аппарата,
но цена такого привода - это цена серв, которые требуются
для обеспечения этих выгод.
Для своей телеги
я купил высоковольтные
цифровые китайские сервы BLS-3114, которые имеют 31кг
усилия на 7.4В бортовом питании и при этом скорость перекладки
0.14с/60°. Сервы в стандартном по размерам формате, но имеющие
легкосплавный фрезерованный металлический корпус и титановый
редуктор. Для акселератора была куплена похожая серва, но
на 25кг на 7.4В.
Параметры блочного
привода вместо 75 мм плеч с прямым линком клевантной нитки,
стали следующими: плечо клевантной качалки 50мм, ход блока
70мм, ход подвижного конца нитки 140мм(2*хода блока). Усилие
при 6.6В на сервах в районе 28кг, что на конце нитки клеванты
даст 28 / 5 / 2 = 2.8кг. Что вполне достаточно для совершения
любых маневров без перегруза серв и риска среза редуктора.
Для подцепа
клевантных ниток к стропам задней кромки, а также ниток аселератора
к мольям акселератора на передних рядах свободных концов,
я использую рыболовные карабины Owner
N2. Это почти самые крупные карабинчики из линейки, но
в тоже время удобные, неразгибаемые нагрузками в парамодели
и долговечные. Также я пользую кольца Axis AX-97119 (Size
8) для привязки их на стропах куда цепляются карабинчики клевант.

Более мелкие
карабинчики (номер уменьшается) ставить не советую даже на
модель с крылом НК - проволока уже разгибается гораздо легче,
и разжимать и сжимать гораздо неудобней. Не стоит экономить
и недооценивать мелкие парапланы. Я сталкивался с ситуацией
когда карабинчик N1 разжимало в кусок прямой проволоки при
банальном силовом повороте на моей телеге весом 1.8кг с крылом
НК.
Основное
правило при настройке угла атаки крыла в полевых условиях
- не забывать также регулировать длину стропы управления!
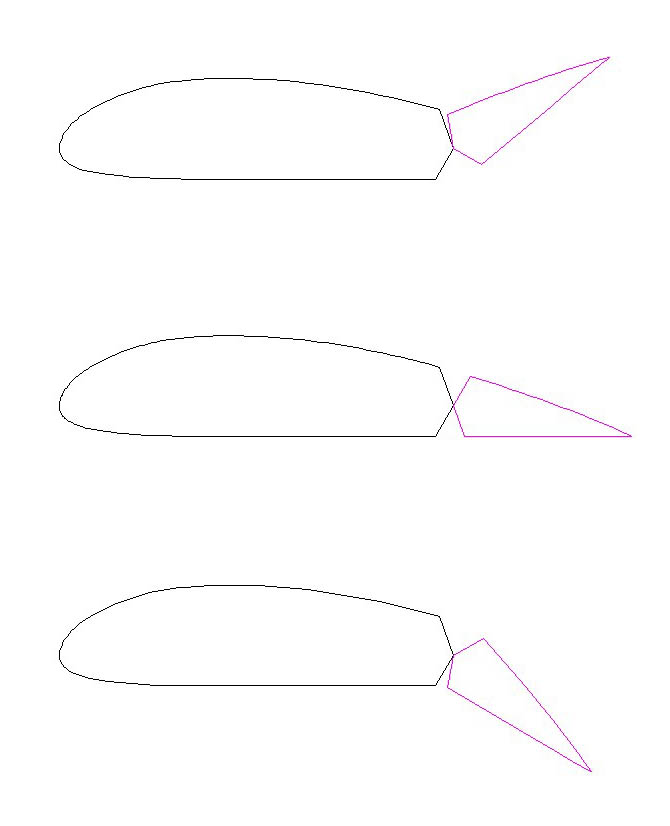
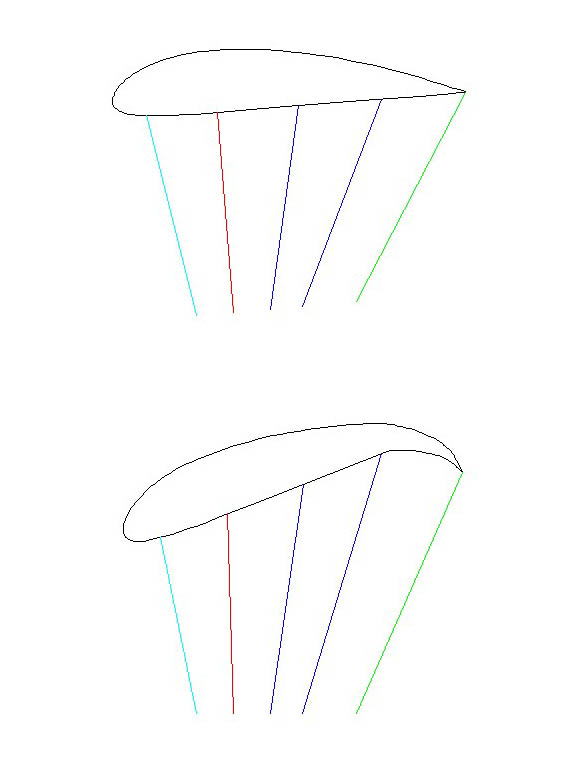
Почему это делать
необходимо? Посмотрим на рисунок ниже:

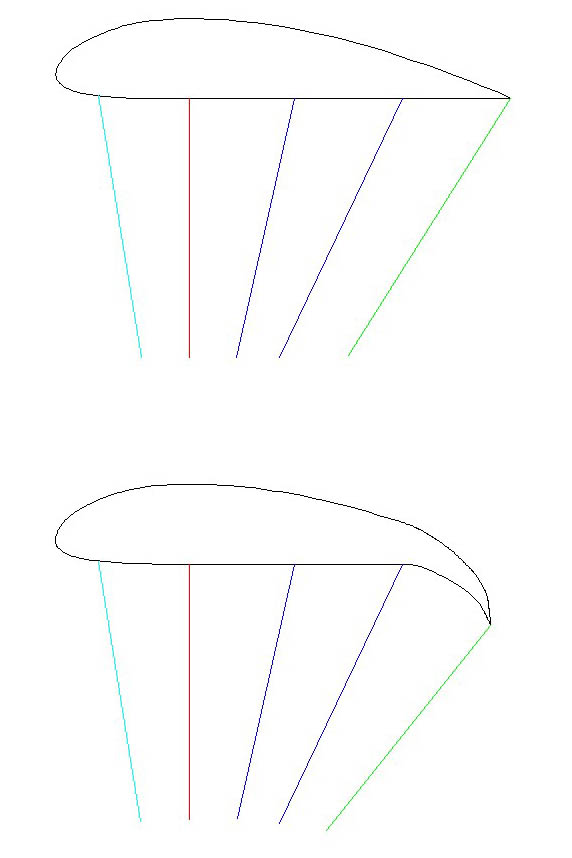
Так как данное
крыло при отпускании триммера(в "минус") как бы
повернулось вокруг переднего ряда, а остальные ряды взаимосвязанно
поменяли свои длины, но привязанная к свободному концу управляющая
стропа не имеет такой степени свободы, то она осталась прежней
длины и задняя кромка автоматически поджалась, как будто обе
клеванты были затянуты. При триммировании в "плюс"
будет обратная ситуация - управляющая стропа не изменив своей
длины относительно других рядов "удлинится" и станет
провисать, тем самым не давая серве клеванты рулить. Большая
часть или же весь ход качалки клеванты будет тратиться на
натяжение управляющей стропы, а не полезного хода задней кромки.
Поэтому необходимо при строповании крыла предусмотреть оперативный
способ изменения длины управляющей стропы. Перевязывание у
свободного конца влечет за собой и изменение длины промежуточной
клевантной нитки, так как изменится длина между колечком на
управляющей нитке и петлей свободного конца. Потому рекомендовано
менять длину со стороны первого разветвления. Так как у моего
крыла все сделано на перевязываемых узлах, мне не составляет
труда изменить длину любой нитки в крыле включая управляющие.
Так что этот момент требует проработки.
АКСЕЛЕРАТОР
НА ПАРАМОДЕЛИ
Акселератор
- это необходимость на взрослом свободном параплане, необязательный
орган управления на моторном взрослом параплане и роскошь
на парамодели. Без него летать будет, но с ним будет летать
интересней!
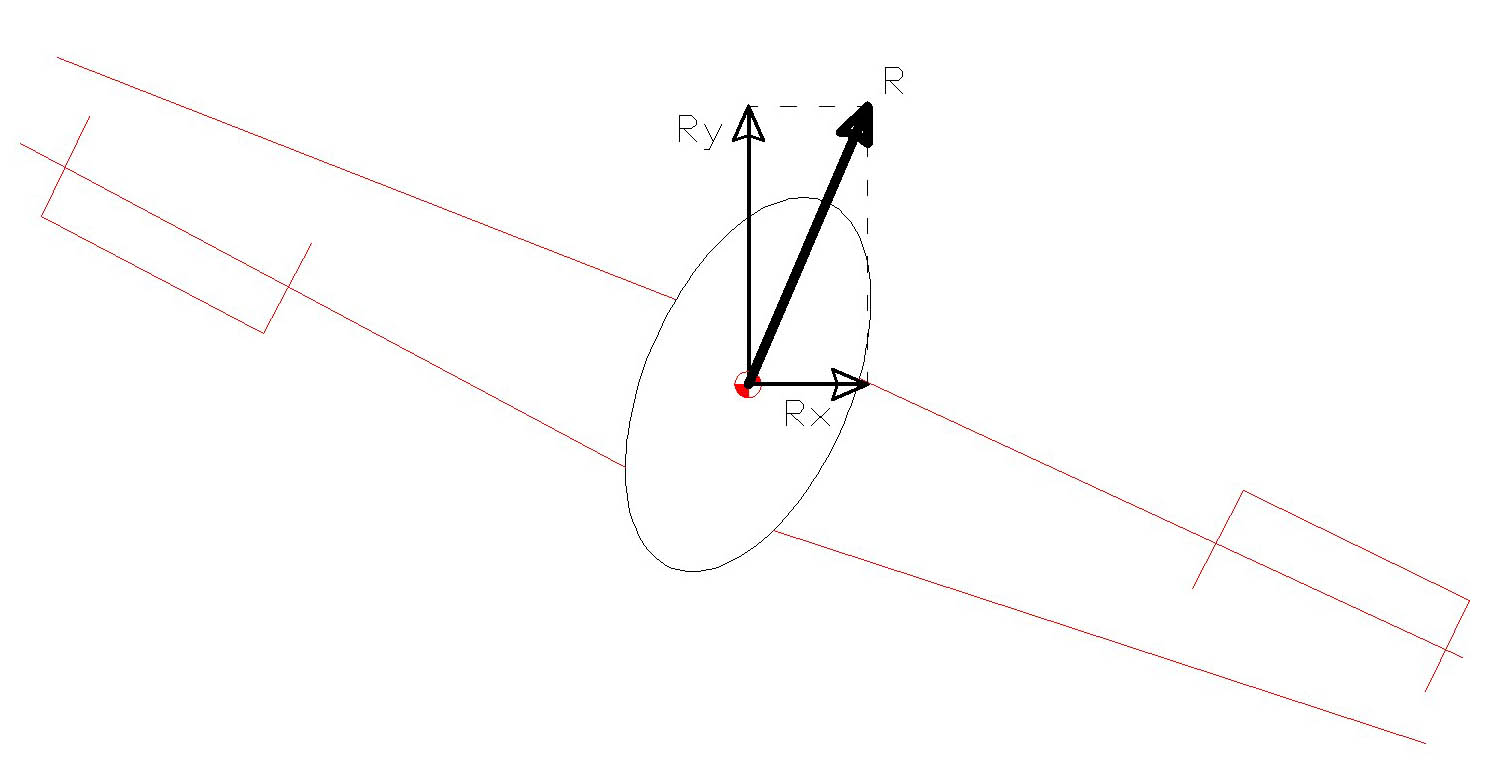
При акселерации
крыло приобретает меньший угол атаки и большую скорость полета,
но также получает и больший риск фронтального сложения. Потому
следует акселерацию применять только в тех случаях когда она
действительна нужна.
Возвращаясь
к регулировке длины управляющей стропы при триммировании,
можно спросить - а что происходит при акселерации с длиной
управляющей стропы? Ответ прост - она "укорачивается",
но в гораздо меньшей степени чем при триммированнии. Физика
проста - при триммировании заднего ряда("неподвижного")
мы как бы поворачиваем профиль вокруг точки на молье первого
ряда, амплитуда изменения высоты самой задней точки профиля
велика - катет равен гипотенузе(расстояние между точкой первого
ряда и самой задней точкой профиля) помноженной на синус угла
поворота профиля при триммировании. Но при акселерации укорачиваются
передние ряды, а не задние и поворот идет вокруг заднего ряда(мольи),
который расположен гораздо ближе к задней кромке, потому гипотенуза
будет в 3 раза меньше и итоговое "укорочение" управляющей
стропы будет мало, что почти не изменит характеристик крыла
(оно приобретет слегка вогнуто-выпуклый профиль с большей
подъемной силой чем с плоской нижней частью в Нейтрали).
Основные проблемы
с реализацией акселератора на парамодели - это рассчет плеча
качалки, рассчет амплитуды хода акселератора и обеспечение
одновременной затяжки обоих предних рядов на свободных концах.
Рассчет плеча
должен строиться от рассчетра амплитуды. При пошиве свободных
концов следует закладывать немного больший ход акселераторной
мольи чем требуется крылу. Хотя заранее неизвестно сколько
же можно максимально украчивать передние ряды чтобы не получить
постоянную фронталку, но имеет смысл придерживаться эмпирической
формуле - максимальный ход акселя не больше 2.5% хорды крыла.
Таким образом для моего Цирруса с хордой 930мм, ход акселя
должен не превышать 25мм. Для обеспечения такого хода в конкретно
моей телеге пришлось применить качалку длиной 45мм. Обусловлено
это высотой расположения сервы по отношению к "полу"
кунга(она стоит почти на уровне пола) и ограничением поворота
качалки только в верхней части круга(верхние 60° поворота
качалки из 120 возможных). Чтобы обеспечить более менее линейную
характеристику вытягивания поворот ограничен 60°. Усилие на
конце плеча будет 22кг /4.5 = 4.8 кг, что превосходит вес
телеги на 2кг и достаточно для выдерживания ее веса в полете.
Выполнение активного
маневрирования в режиме акселерации нерекомендуется, так как
во-первых крыло более склонно к сложениям, и нагрузка на серву
растет с перегрузками - при 2G уже усилие на конце плеча(вес
телеги) качалки перевалит далеко за максимальное усилие сервы
и она может поломаться(сорвет редуктор, погорит мотор или
транзисторы).
Выполнять
высоконагруженные маневры нужно только в нормальном положении
акселератора(убран), когда всю нагрузку воспринимают не серва
акселя, а ремни свободнных концов. У моторизованного параплана
всегда больше всего нагружены первые ряды, потому перегрузки
будут больше всего влиять на них и на серву акселя!
Чтобы отвести
обе нитки от качалки сервы акселератора к свободным концам
требуется достаточно непростая система направляющих колец
или роликов(или их комбинации). Я сделал именно комбинацию
(изначально были все ролики, но потом отказался от такой схемы):




В конечной схеме
остались только первые ролики, рядом расположенные. Они параллелят
нитки на первом отрезке и при любом положении качалки длины
их почти не меняются относительно друг друга. Позднее я часть
роликов заменил на полипропиленовые
хомутики для привинчивания проводов к стене. Они гладкие,
с отбортовкой чтобы стропы не перетирались и легко монтируются
и стоят копейки за 100шт.
Наличие первых
направляющих роликов почти обязательно, так как они первыми
принимают нагрузку и угол выхода нитки под 90°. Трение скольжения
не рекомендуется для такого поворота, потому лучше иметь трение
качения.
НАСТРОЙКА
СТРОП КЛЕВАНТ И АКСЕЛЕРАТОРА
Что касается
настройки строп клевант и акселя, то тут есть два пути - практический
и приблизительный. Первый требует первоначальной продувки
крыла на ветру, регулировки и тестового полета и повтора цикла
регулировки, а второй путь - это вытягивание пристегнутого
крыла примерно в полетное положение (купол чуть позади) и
регулировка длин строп в таком положении с последующими полетами.
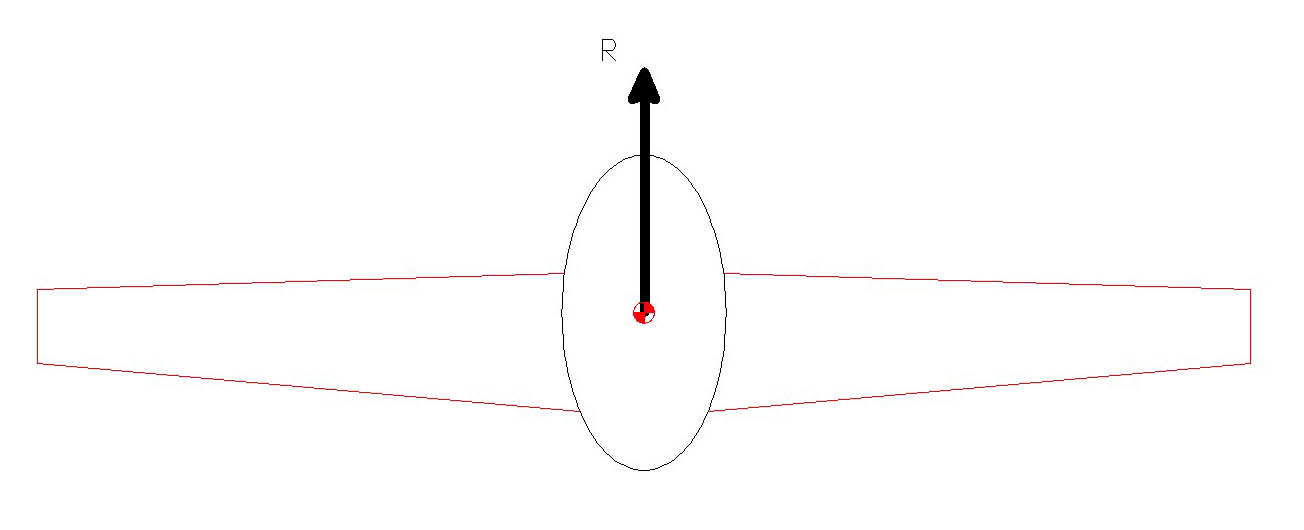
Что значит вытягивание?
Берем в охапку концы и распускаем их так как они примерно
займут во время моторного полета. См.
Ситуацию 2
Далее цепляем
карабинчики на мольи акселя и переводим его на пульте в отпущенное
положение. Далее регулируем длины ниток так чтобы в этом положении
качалки сервы(вверх), ремни первого ряда были натянуты и воспринимали
всю нагрузку на себя, но стропы акселя бы были не провисшими,
а почти натянутыми. Серва не должна "петь" если
взять руками за концы и подвесить ее. Регулировка клевант
делается похожим способом, только вытягивать надо управляющую
нитку примерно на тот градус что будет в полете(см вышеприведенную
ссылку), при натянутой стропе, клевантная нитка с зацепленным
к колечку карабинчиком также должна иметь почти натянутость,
и без слабины. Иными словами в полете при отпущенных клевантах
нагрузку должны воспринимать натянутные управляющие стропы,
а не сервы через клевантные нитки.
После пробных
полетов может показаться что что-то перетянуто или недотянуто
- нужно смотреть на опущенность задней кромки крыла, тенденции
к поворотам в какую то сторону при свободном планировании
(без тяги!). Если где то перетянуто, то нужно сесть и отпустить
немного на клевантной стропе или на корневой управляющей стропе
у первого разветвления.
Нужно
запомнить что триммировать модель параплана как модель самолета
(с пульта) нельзя! Здесь совершенно иная тактика управления
в небе, и подтянув сервой нитку при "модельном триммимровании"
- неизбежно сократится полезный ход клеванты и соотвественно
изменится работа тормоза. Гораздо надежней изменить длину
нужной стропы! В процессе эксплуатации я вообще ни разу не
трогал триммера на пульте.
Часть первая. Материальная
часть
Часть вторая. Система крыло-телега
Часть третья. Телега: особенности
настройки
Часть четвертая. Телега: управление
и тактика подбора комплектующих