ЧАСТЬ ВТОРАЯ
Система крыло-телега
Минутка теории
Как известно, параплан - это
летающий аппарат тяжелей воздуха и с мягкой оболочкой, которая
держит свою форму за счет натяжения стропной системы и груза
к нему подцепленного и внутреннего давления в оболочке за
счет набегающего потока воздуха. Кроме прочего аппарат летит
имея равновесие сил действующих на аппарат.
Не будем заострять
внимание на полный теоретический курс по аэродинамике парапланов.
Достаточно прочесть любую книгу по взрослым парапланам (список
книг дан в конце статьи) для понимания физики их полета. В данной
части я покажу те различия, которые прямо влияют на поведение
модели парплана если она моторная или безмоторная в разных режимах
и базовые понятия по методам регулировки крыла.
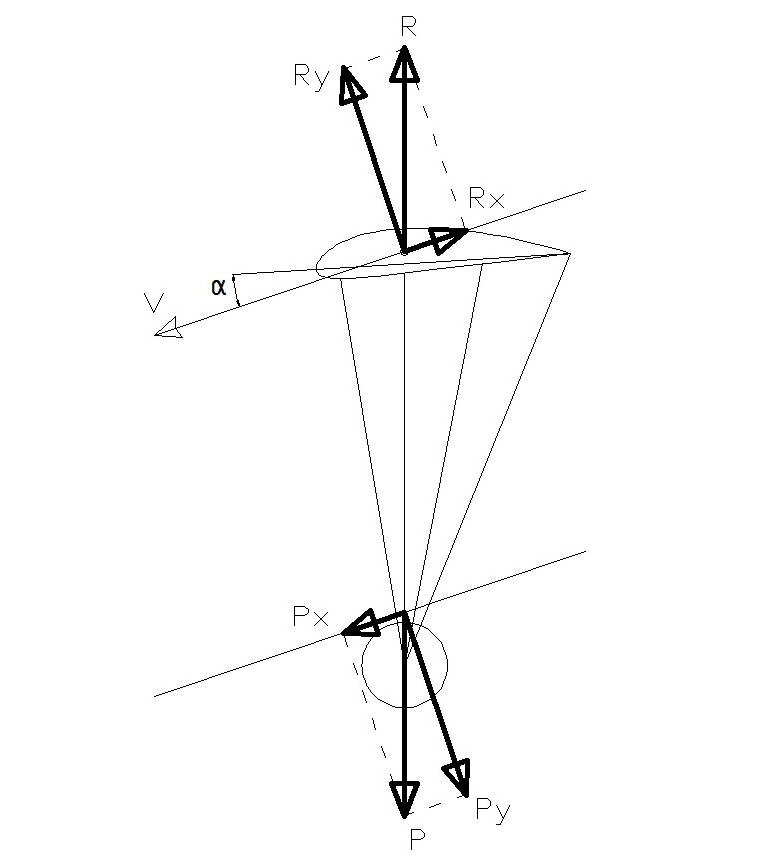
Упрощенная картина действующих
сил на параплан в свободном состоянии, показана ниже:
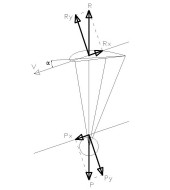
Где:
V - вектор скорости(направление движения),
a - угол атаки крыла по отношению к вектору скорости,
R - результирующая подъемная сила,
Ry - проекция сила крыла на перпендикуляр к вектору скорости(сопротивление
крыла),
Rx - проекция сила крыла на горизонталь вектора скорости(подъемная
сила крыла),
P - сила притяжения(вес) всего аппарата, приложенная к точке
ЦТ(расположена между крылом и пилотом/телегой),
Px - проекция силы притяжения, дающая всему аппарату лететь
вперед(планировать), преобразуя потенциальную энергию в кинетическую,
Py - вертикальная к направлению скорости проекция силы тяжести.
Картинка показывает что, при
наличии веса в пилоте или телеги и некотором угле атаки крыла,
аппарат будет двигаться вперед с некоторой скоростью под действием
силы тяжести и возникающей при движении подъемной силы крыла.
Чем меньше угол атаки крыла (хорда профиля крыла ближе к вектору
скорости), тем быстрее параплан будет "скатываться"
вниз за счет меньшего сопротивления профиля крыла. Точно также
будет влиять больший вес пилота/телеги, в силу большей составляющей
Px. Больший угол атаки крыла даст большее сопротивление крылу
и меньшую скорость скольжения по траектории.
Величина наклона спуска вектора
V зависит от аэродинамиеского качества системы крыло-стропы-пилот(телега),
скорости аппарата и силы встречного ветра. Чем качество выше,
тем отклонение вектора от горизонтали меньше и траектория
более пологая, чем качество хуже тем соответственно траектория
более крутая.
Частные случаи
полета
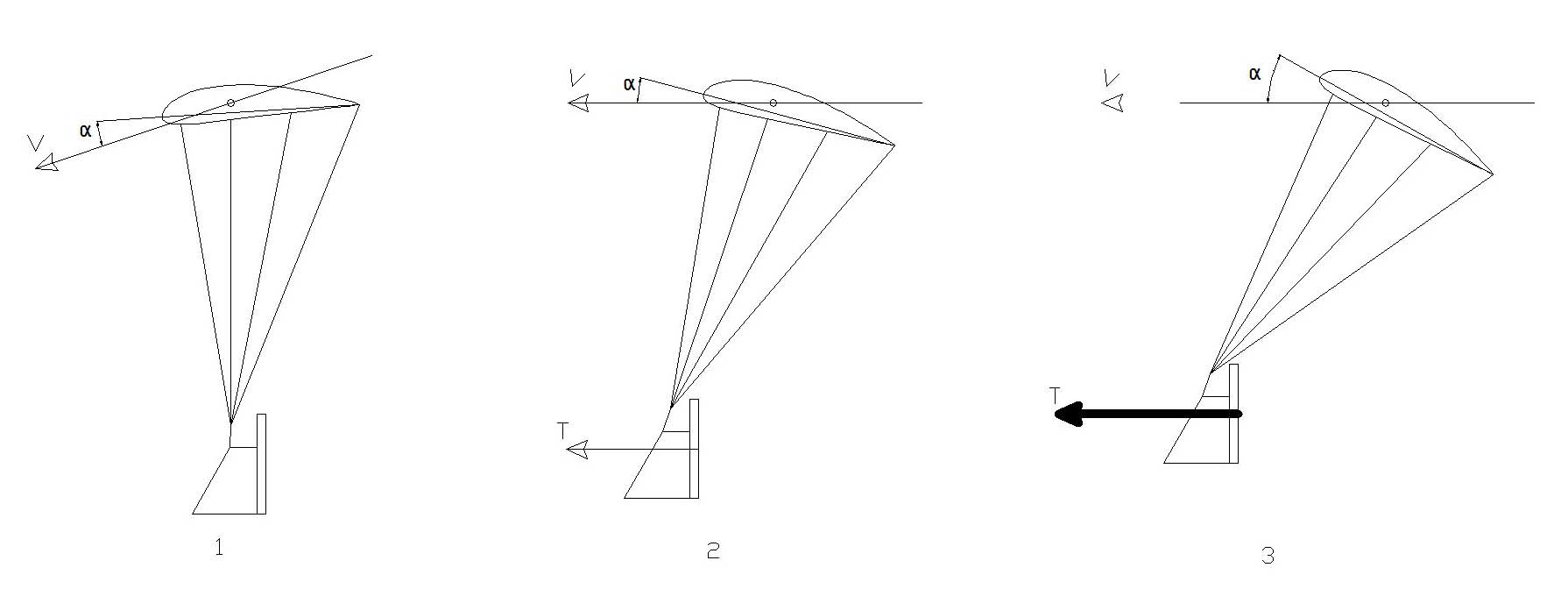
Рассмотрим теперь
моторный параплан в нескольких полетных ситуациях: безмоторный
полет (планирование), нормальный моторный полет (с оптимальным
шагом винта) и предсрывной моторный полет (с очень большим шагом
винта).
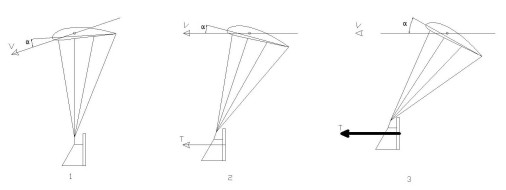
Ситуация
1 показывает нормальное планирование аппарата по некоторой
траектории V, зависящей от аэродинамического качества аппарата.
Угол атаки(альфа) имеет некоторое положительное значение и крыло
находится в аэродиначески стабильном состоянии. Риск подворачивания
передней кромки крыла минимален, риск заднего сваливания(срыва)
также минимален.
Ситуация
2 показывает нормальное движение аппарата под действием
моторной тяги с оптимальным шагом винта. Телега вырывается немного
вперед и как бы обгоняет крыло. Происходит это потому, что 1)
крыло и стропная система имеют большое лобовое сопротивление и
тормозятся по отношению к толкаемой мотором телеге 2) крыло и
телега связаны не жестко, а гибко и крыло может поворачиваться
целиком вокруг точки подцепа к карабинам телеги. В данной ситуации
вектор направления движения крыла и телеги совпадают и приняты
условно горизонтально(горизонтальный полет). Сила Т(тяги) давит
вдоль вектора скорости V. Телега для простоты имеет в этом состоянии
вертикальное положение плоскости винта (на практике это тоже так
если телега имеет нейтральную центровку о которой будет сказано
дальше). Угол атаки(альфа) такой же как и при безмоторном полете
и крыло также находится в состоянии аэродинамической стабильности
с минимальными рисками фронтального сложения и заднего свала.
Ситуация
3 показывает ненормальное движение аппарата под действием
моторной тяги с очень шаговитым винтом. Телега очень сильно вырывается
вперед, очень обгоняя крыло за счет очень высокой скорости потока
от винта. Так как крыло имеет конечное лобовое сопротивление,
то крыло будет еще больше поворачиваться относительно телеги и
иметь гораздо больший угол атаки. Такое положение крыла будет
давать высокий риск заднего свала, но нулевой риск фронтального
сложения. Аппарат будет лететь очень медленно или вообще не лететь,
а висеть с постоянным раскачиванием крыла вправо-влево(начало
срыва на разных частях крыла). Такая ситуация зовется "волочащееся
крыло". Данный режим характерен тем что скорость движения
всего аппарата в целом уже не растет вслед увеличению тяги двигателя.
Скорость потока от шаговитого винта толкает телегу с большей скоростью,
крыло больше уходит назад и создает еще больший тормозящий парус,
снижая скорость аппарата вплоть до нуля и возникновения заднего
свала(срыва) вследствие закритичечкого угла атаки крыла. При этом
аппарат будет некоторое время набирать высоту преобразуя, излишек
получаемой от мотора кинетической энергии в приращение потенциальной(высоты),
но потом начнет падение с негативной спиралью(вращение крыла подобно
вертолетному винту).
МЕТОДЫ РЕГУЛИРОВКИ КРЫЛА
Существует два механизма
изменения установочного угла (и в конечном итоге угла атаки крыла)
- динамический и статический.
Динамический
способ изменения угла атаки реализуется так называемым
акселератором. Свободные концы стропной системы имеют возможность
укорачивать передний ряд и связанные с ним через специальную конструкцию
концов, все последующие ряды или же часть рядов. Как это выглядит
в кинематике показано на рисунке ниже:
На настоящем параплане,
пилот вытягивает специальную ленточную педаль ногами. Педаль связана
двумя веревками с быстроразъемными карабинами Брумеля, которые
закреплены на стяжных шнурах пропущенных через 2 блока на переднем
ряде свободных концов. Другие свободные концы рядов связаны через
промежуточные ленты-рычаги и опускаются в строго заданной производителем
крыла пропорции. Акселератор изменяет угол атаки только в меньшую
сторону, опуская переднюю кромку крыла относительно задней кромки
и тем самым поворачивая все крыло.
Изменение в полете
угла атаки позволяет ускорить крыло как в свободном полете, так
и в моторном. В свободном полете крыло помимо повышенной скорости
получает также риск фронтального сложения передней кромки крыла,
так как хорда крыла приближается к вектору скорости. В моторном
полете этот риск меньше, так как крыло тянется за телегой и пребывает
всегда с достаточным положительным углом атаки не позволяющем
крылу подсложиться. Однако это верно до тех пор пока сохраняется
достаточная для горизонтального полета тяга.
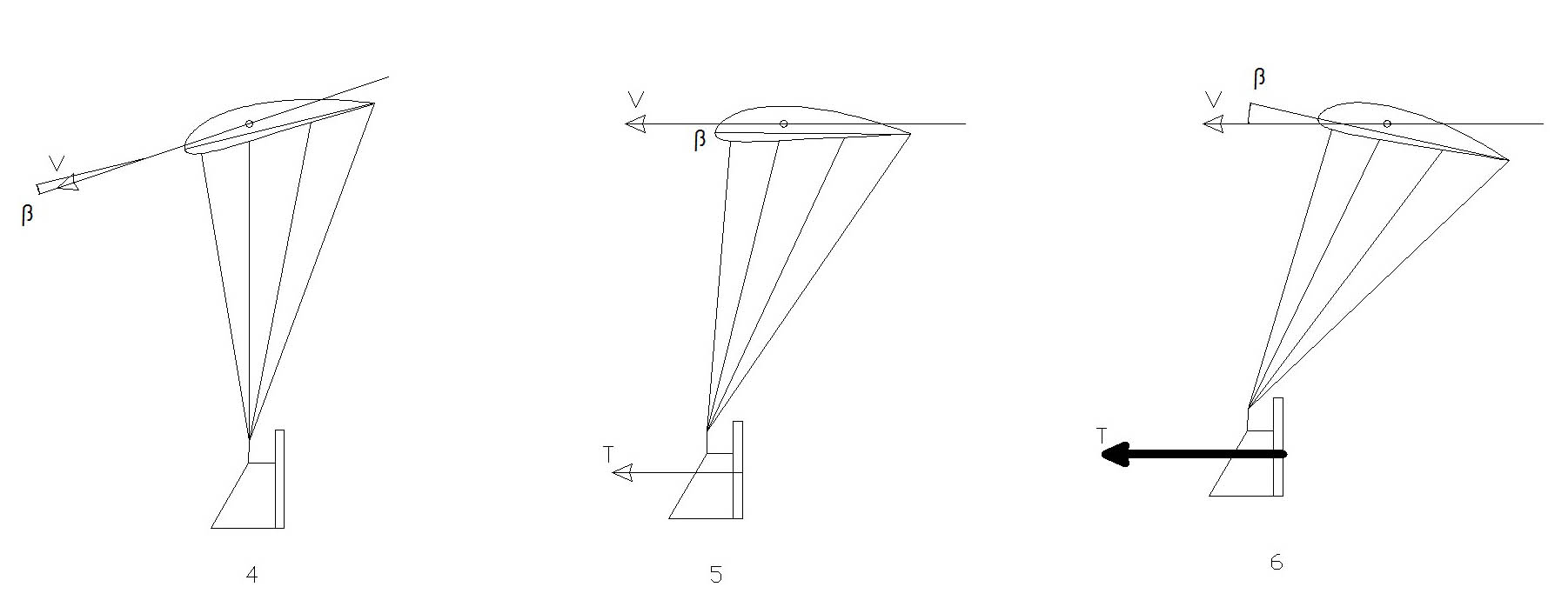
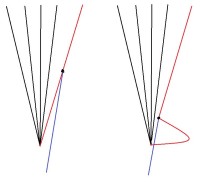
Рассмотрим три полетные ситуации
описанные выше но при выдавленном(вытянутом) акселераторе, который
уменьшил угол атаки крыла до значения бетта.
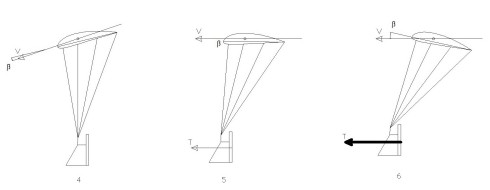
Ситуация
4 показывает нормальное планирование аппарата по некоторой
траектории V. Угол атаки(бетта) имеет некоторое почти нулевое
значение и крыло хоть находится в аэродиначески стабильном состоянии(пока
движется), но имеет большой риск фронтального сложения из-за различных
неоднородностей атмосферы(турбулентность, порывы ветра, термические
пузыри) или качества пошива передней кромки купола. Риск заднего
сваливания(срыва) почти нулевой. Крыло в этой ситуации будет скользить
вниз по траектории снижения быстрей, пробивая встречный ветер
более эффективно, но сокращается время полета и соотвественно
его дальность. В целом данный решим считается опасным, так как
аэродинамическое качество крыла и особенно качество пошива передней
кромки купола крыла очень влияют на стабильность крыла в таком
пограничном режиме.
К примеру если рассматривать
купол крыла HobbyKing 2.15m, то у него качество кромки достаточно
низкое, так как кромка не прошивается специальной лентой для предовращения
ее сминания. Такое крыло в Ситуации 4 будет давать непредсказуемые
сложения даже при незначительных внешних дестабилизирующих факторах
(турбулентность, порывы ветра, термические пузыри). Отмечалось
трепыхание пролетов верхней оболочки на передней кромке в полете.
Если рассмотреть качество передней кромки моего нового крыла Cirrus
PRO 3m2 с его замкнутой кромкой с забранными сеткой заборными
окнами и прошитой элементами жесткости продольными лентами - самопризвольных
сложений в очень акселерированном состоянии крыло почти не дает,
только при выполнении фигур акробатики. Но достаточно сильные
дестабилизирующие факторы все же имеют большое влияние на крыло
в подобном режиме полета.
Ситуация
5 показывает нормальное движение аппарата под действием
моторной тяги с оптимальным шагом винта. Крыло хоть по-прежнему
имеет почти нулевой угол атаки по отножению к вектору его движения(набегающего
потока), но благодаря тому что есть постоянная тяга двигателя
телеги и крыло тянется позади телеги, оно стабильно в своем состоянии.
Аппарат будет двигаться примерно на 15-25% быстрее чем без акселерации.
Поверьте - этого хватает пробиваться моему аппарату через достаточно
сильный ветер со скоростью в 6-7 м/c, при том что без акселератора
аппарат начинает "висеть" против ветра в 5 м/c.
Ситуация
6 показывает ненормальное движение аппарата под действием
моторной тяги с очень шаговитым винтом. Вы спросите: "Почему
ненормальное если на картинке крыло имеет угол атаки такой же
как при Ситуации 2, т.е. нормальном полете!". Ответ прост
- такой режим полета не вечен и при снижении тяги или полном ее
сбросе полет перейдет к Ситуации 4 со всеми вытекающими последствиями.
Надо сказать что
мотопараплан (как модель так и взрослый парамотор) очень не любит
резкую работу с тягой. Это не самолет с жестким крылом и жестким
его креплением к фюзеляжу. Здесь все более инертное, все не жесткое,
а гибкое и имеет несравнимо более худшее аэродинамическое качество.
При полете на большой тяге с акселерацией и винтом большлого шага
модель движется достаточно быстро, стабильно, но при сбросе газа
телега резко останавливается так как ее ничего не толкает уже,
крыло резко "выстреливает" вперед и крыло приходит к
фронтальному сложению или к резкому клевку вниз. Парировать это
можно клевантами, но сделать это будет очень сложно, ибо процесс
быстрый. Достаточно сложно с шаговитым винтом и акселерированным
крылом получить одновременно стабильное крыло во всех положениях
тяги, я бы сказал почти невозможно.
Статический
способ изменения угла атаки реализуется с помощью так называемых
триммеров. Кинематически они аналогичны акселератору, но расположены
на концах заднего ряда. На больших парапланах изменение длины
концов задних рядов осуществляется оттяжкой ремней с фиксацией
их специальной зажимной пряжкой. Триммеры укорачивают и удлиняют
задний ряд и связанный с ним все последующие вперед ряды(или их
часть) и подымают или опускают заднюю кромку по отношению к передней.
В больших парпланах
существует великое множество конструкций свободных концов с триммерами
(надо сказать что триммеры есть как правило только на концах моторных
крыльев для парамоторов и паралетов/телег), так как обычно рядов
на большом параплане 4(ABCD) плюс ряд на задней кромке, подгибаемой
двумя клевантами. Обычно делается конструкция свободных концов
так чтобы акселератор опускал передние два ряда(А и В), а триммер
изменял высоту рядов C и D. Такие свободные концы деформируют
профиль крыла. Но встречаются и более сложные конструкции свободных
концов, которые не деформируют профиль и триммирование или акселерация
ведут к повороту профиля целиком без искажений.
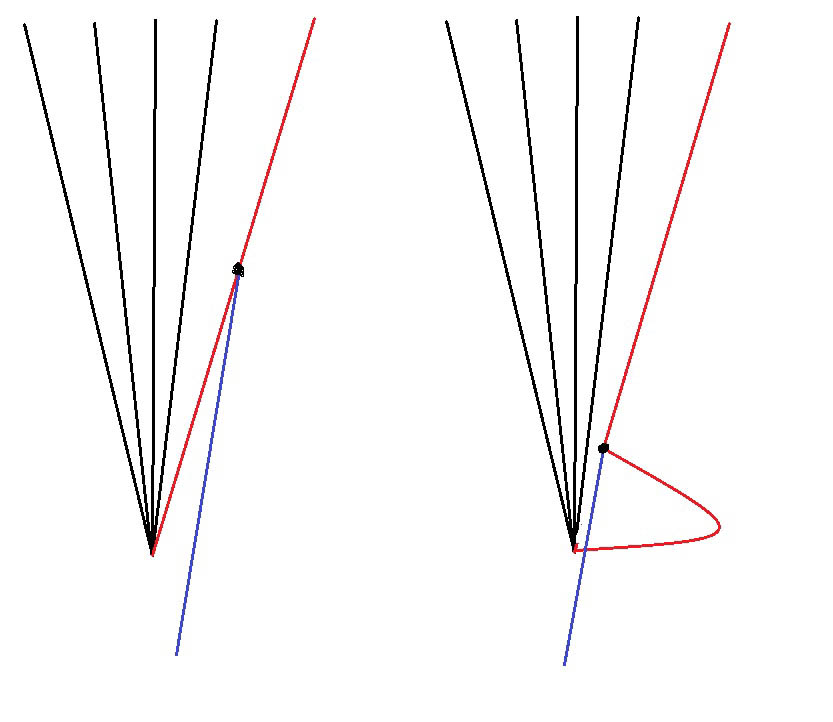
Для своей модели
я выбирал крыло кайта также и с точки зрения легкости реализации
свободных концов с полной их механизацией, потому и было куплено
крыло Cirrus PRO с трехрядной силовой строповкой и четвертым рядом
клевант. Конструкция концов вышла прямозависимая для среднего
ряда. Другими словами ряд В опускается или подымается и при тримммировании
и при акселерации. Профиль в данном случае не искажается:

Справа налево на
картинке идут: конец переднего ряда А с мольей(треугольным вшитым
в ремень кольцом) акселератора, дуга связывающего аппарата, по
которому бегает конец среднего(зависимого) ряда, конец заднего
ряда с прямоугольным кольцом и триммерной лентой с фиксирующей
пряжкой, конец триммерной ленты выходящей из третьей прорези пряжки,
которая выводит ленту вверх, для удобства эксплуатации.


Все свободные концы
сходятся в главной петле, в которую продевается карабин на телеге.
Также сзади на стороне заднего ряда у самой главной петли пришита
петелька из той же ленты для привязывания корневой управляющей
стропы заднего ряда.

В парапланеризме
есть устоявшиется словесные формулировки относительно триммирования
крыла:
Затягивание триммера - действие с триммером,
вызывающее опускание задней кромки крыла и увеличение его угла
атаки
Отпускание триммера - действие с триммером, вызывающее подъем
задней кромки крыла и уменьшение его угла атаки.
Причем в больших
парапланах существуют триммеры как "минус", так и "плюс",
с различием в положении уровней концов в разных крайних положениях,
но для простоты принято считать что максимально затянутые триммеры
дают минимальную скорость свободного полета, а отпущенные максимальную(триммированную)
скорость планирования.
Я в свох свободных
концах сделал большее - я дал возможность как отпускать, так и
затягивать триммеры от некоторого среднего положения концов. Среднее
положение зовется Нейтралью, когда мольи на свободных концах на
одном уровне и длины всех трех рядов отсчитывая от главной петли
одинаковы. В этом положении крыло имеет небольшой отрицательный
угол атаки крыла за счет длин самих строп рядов. Этот угол соотвествует
оптимальному углу атаки крыла(см. выше картинку "Ситуация
1"). Мои свободные концы имеют гораздо большую степень свободы
по триммированию чем у больших парапланов. Это мне потребовалось
для проведения экспериментов и поиска оптимумом для достроповки
нижнего уровня стропной системы (когда я менял форму арки и высоту
стропной системы кайта).
ИТОГО про
ТРИММИРОВАНИЕ и АКСЕЛЕРАЦИЮ
Триммирование крыла
- это неотъемлемая часть его настройки под определенную погоду.
В штилеватую погоду с ветром 0-2 м/c нужно триммеры отпустить
до нейтрали (оптимального угла атаки). В ветренную погоду триммеры
можно отпустить для еще меньшего угла атаки, но необходимо учесть
что теряется аэродинамическое качество крыла и возможен риск его
фронтальных сложений.
Затягивание триммеров
в плюс от нейтралей практически не имеет особой необходимости
на моделях, разве что если крыло при строповке не имеет того оптимального
угла атаки в нейтрали. Тогда триммером настраивается этот угол
и считается новой нейтралью(хотя я после получения данной поправки
просто изменил длины строп рядов и перетриммировал концы обратно
в Нейтраль).
По
сути нет того универсального угла атаки годного для полетов в
любой ветер! Потому крайне желательно иметь на модели такие свободные
концы, которые позволяют изменять углы атаки крыла оперативно
и без сложных технологических операций.
Акселераратор иметь
на моторной телеге весьма желательно, особенно если хочется иметь
возможность в любой момент пробиться через достаточно плотный
ветер или же более стабильно набирать высоту на таком ветре без
постоянной борьбы с кабрированием.
Управляющий
задний ряд
Есть небольшая тонкость
в вопросе триммирования крыла при его настройке на погоду или
эксперимент - при изменении угла атаки на свободных концах изменяется
и длина управляющей нитки. Точнее должна изменяться! Но обычно
об этом забываешь на поле. Независимо от способа крепления управляющих
клевантных ниток к качалкам(прямой линк или промежуточный) - длина
ее не меняется, но весь профиль то поврачивается! Значит при уменьшении
угла атаки задняя кромка поднимется(и достаточно существенно)
и неизменная по длине нитка клеванты подожмет заднюю кромку, при
триммировании на увеличение угла атаки задний ряд должен укоротиться,
и при неизменной нитке клевант она начнет провисать.
Напомню что такое
промежуточное управление клевантами:
Корневая нитка(клевантная)
управляющего дерева строп привязывается в положении Нейтрали к
петле на свободном конце(если она там оборудована) или просто
приматывается у главной петли если скажем свободные концы простейшего
вида как у крыла НК. На некотором расстоянии равным величине хода
управляющей нитки (максимальной амплитуды хода качалки сервы)+
пару-тройку сантиметров, на нитке привязано стальное рыболовное
колечко(я использую Owner N2 и кольца и карабины). Длина приязанной
управляющей стропы такая чтобы задняя кромка была вровень по нервюре
со всеми нижними петельками начиная с второго ряда. Другими словами
кромка не должна быть затянута вниз или оттянута вверх. Идеально
если на вывешенном крыле(если оно позволяет это сделать) все нитки
в дереве управляющего ряда будут не натянуты и не прослаблены.
К колечку цепляется
карабинчиком нитка, которая уже проходит через ряд направляющих
колец (роликов или подобных элементов) к качалке и тем или иным
способом (напрямую или через блок) будет качалкой тянуться. Когда
нитка тянется, она укорачивает только ту часть привязанной корневой
управляющей нитки что расположена между кольцом и привязаным концом.
Сильно много припуск(>2-3см) делать нельзя, так как при вытягивании
нитки образующаяся слабина управляющей нитки будет затягиваться
в винт и рубиться, ибо она будет болтаться на ветру и рядом с
ограждением.
Для регулировки
длины корневой нитки я использую те узловые соединения что были
изначально конструктивно заложены в моем кайте Циррус ПРО. Я сделал
большой припуск на изменения с той стороны нитки где она расходится
на первом разветвлении. Если я триммирую - я тут же изменяю и
длину корневой нитки чтобы уровень задней кромке сохранился, а
не перешел в затянутое состояние или со слабиной, которую и будет
выбирать серва вместо полезной работы хода качалки.
Часть первая. Материальная
часть
Часть вторая. Система крыло-телега
Часть третья. Телега: особенности настройки
Часть четвертая. Телега: управление и
тактика подбора комплектующих